(this is a computer graphics project)
the big idea
The general direction of computer graphics development is, naturally, focused on the increase of realism - higher levels of detail, more advanced lighting, better effects and simulation. This is very cool, of course, and has led to incredible looking visuals.
but i dont want to deal with the cutting edge.
This is the start of a series of 'experiments' in low(er)-poly graphics. Specifically, I want to explore/create various mesh generation techniques. As of right now, I plan for each of these experiments to center around some abstract representation that defines a model less explicitly than directly specified vertices/edges/faces, and a mesh generation method to go with it.
Mesh generation is a well studied subject, and it has yielded efficient and specification-faithful techniques. My main focus, however, is more on making methods that generate interesting looking meshes. Of course, efficiency and faithfulness are still important, but I see them as secondary - this is, in a way, an art project.
plato suggests that physical objects in our physical world world, that we see/touch, are mere portrayals or reflections of some true form of the object, an abstract 'concept' of the essense of object. you can draw a million circles, but none of them is entirely the true concept of a circle, while all of them share that they are portrayals of the form of a circle.
in my dreams i see it all
A farther-fetched idea I had a while ago was for a representation method that was able to be (relatively easily) described via 2D drawings that I could make on paper in a notebook. I don't entirely know how this would work, but it seems that the representation would have to be both simple and quite abstract.
This would also require making a visual descriptor language alongside the representation method. In my head I imagined something like the Words of Creation.
anyway
This website is a means for me to track, (semi)-formalize, and share these projects, as well as some hopefully interesting renders that come out of them. It will also hopefully motivate me to work on this consistently.
[1] boolean fields and wrapping
This is something I tried a bit ago that I see as the first attempt of this.
representation
The 'blackbox' form of this object representation is simply a function that, given a point (in 3D), returns whether the point is in the object or not.
For example, to describe a sphere of radius 5 centered at the origin, the function would be
bool in_sphere(point p):
return distance(p, (0, 0, 0)) <= 5
mesh generation
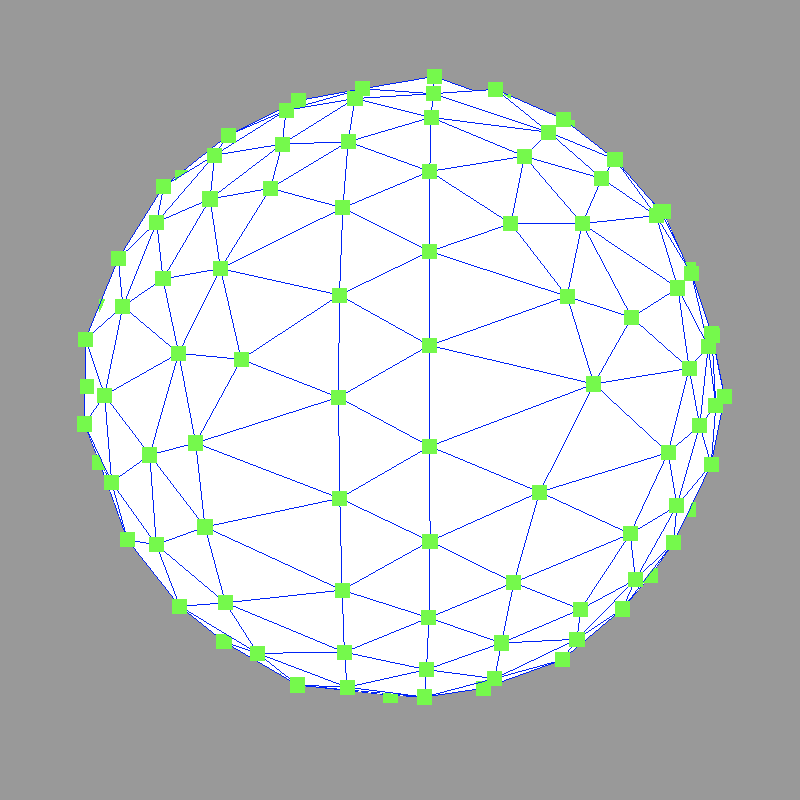
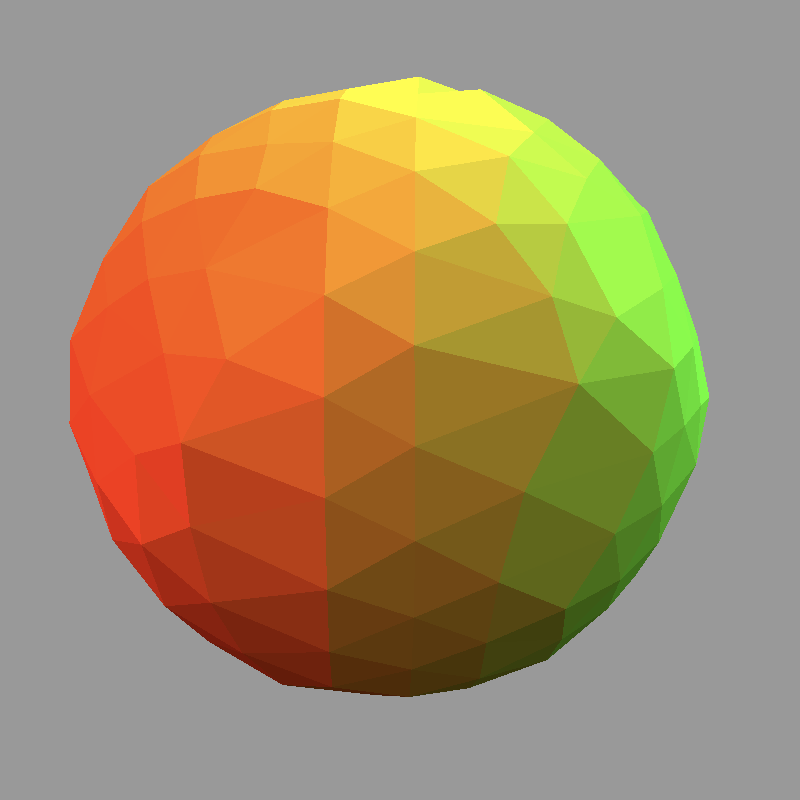
The generation method creates a mesh of equilateral(-ish) triangles that 'shells' the underlying form to approximate its shape.
The method takes as input:
- the underlying form as a function
bool(point) in_obj - a specified side length
float s - an angle step
float alpha
The mesh generation is intuitively like 'wrapping' the object with a triangle mesh. We first start with a single triangle (of side length s) on the surface of the object. Then, based on the assumption that a single edge must belong to exactly two triangles, we perform a floodfill-like exploration from edges belonging to only a single triangle, 'rotating' a new triangle around the edge until we find a valid vertex on the surface of the object. We do this until we no longer have any single-triangle edges.
A (very) rough outline of the method is as following (ignoring the nuances that come with interference checking and rotation):
Mesh wrap(
bool(point) in_obj,
float s,
float alpha
):
mesh = new empty Mesh
v_0 = any point on the surface
v_1 = a point on the surface a distance s from v_0
v_m_0, v_m_1 = add v_0, v_1 to mesh
e = add edge(v_0, v_1) to mesh
edge_q = new empty queue
add e to edge_q
while (edge_q not empty):
new_tri = add_triangle(
mesh,
edge_q.pop(),
in_obj,
s,
alpha
)
add all lonely edges of new_tri to edge_q
// lonely edges defined as being part of only one triangle
return mesh
tri* add_triangle(
Mesh m,
Edge e,
bool(point) in_obj,
float s,
float alpha
):
v_start = any point a distance s from both endpoints of e
for 0 <= cur_angle < 360; step = alpha:
v_pot = rotate v_start by cur_angle around e
next_angle = cur_angle+alpha
next_v_pot = rotate v_start by next_angle around e
if in_obj(v_pot) == in_obj(next_v_pot):
continue
if v_pot is in or near m:
close_vs = vertices in m close (< a configured distance) to v_pot
for close_v in close_vs:
pot_tri = triangle(close_v, e.v1, e.v2)
if pot_tri does not interfere with m:
add pot_tri to m
return pot_tri
continue
v_m = add v_pot to m
tri = triangle(v_m, e.v1, e.v2)
add tri to m
return tri
return null

Due to its stochatic nature and arbitrary collision checking, the generated mesh usually ends up with some missing triangles that I have to fill in manually, which is annoying, but the generation algorithm can definitely be improved.
its a start i guess
This algorithm is wildly inefficient and a little naive, but it's a fine start and does produce some nice looking meshes. The representation method is very unrestrictive and easy to specify, so you can do things like this:
bool in_cube(point p):
return (-2 <= p.x <= 2) and (-2 <= p.y <= 2) and (-2 <= p.z <= 2)
bool in_sphere(point p):
return distance(p, (2, 2, 2)) <= 2
bool in_cylinder(point p):
return distance((p.x, p.y), (1.5, 1.5)) <= 1
bool in_amalgamation(point p):
return (in_cube(p) or in_sphere(p)) and not in_cylinder(p)
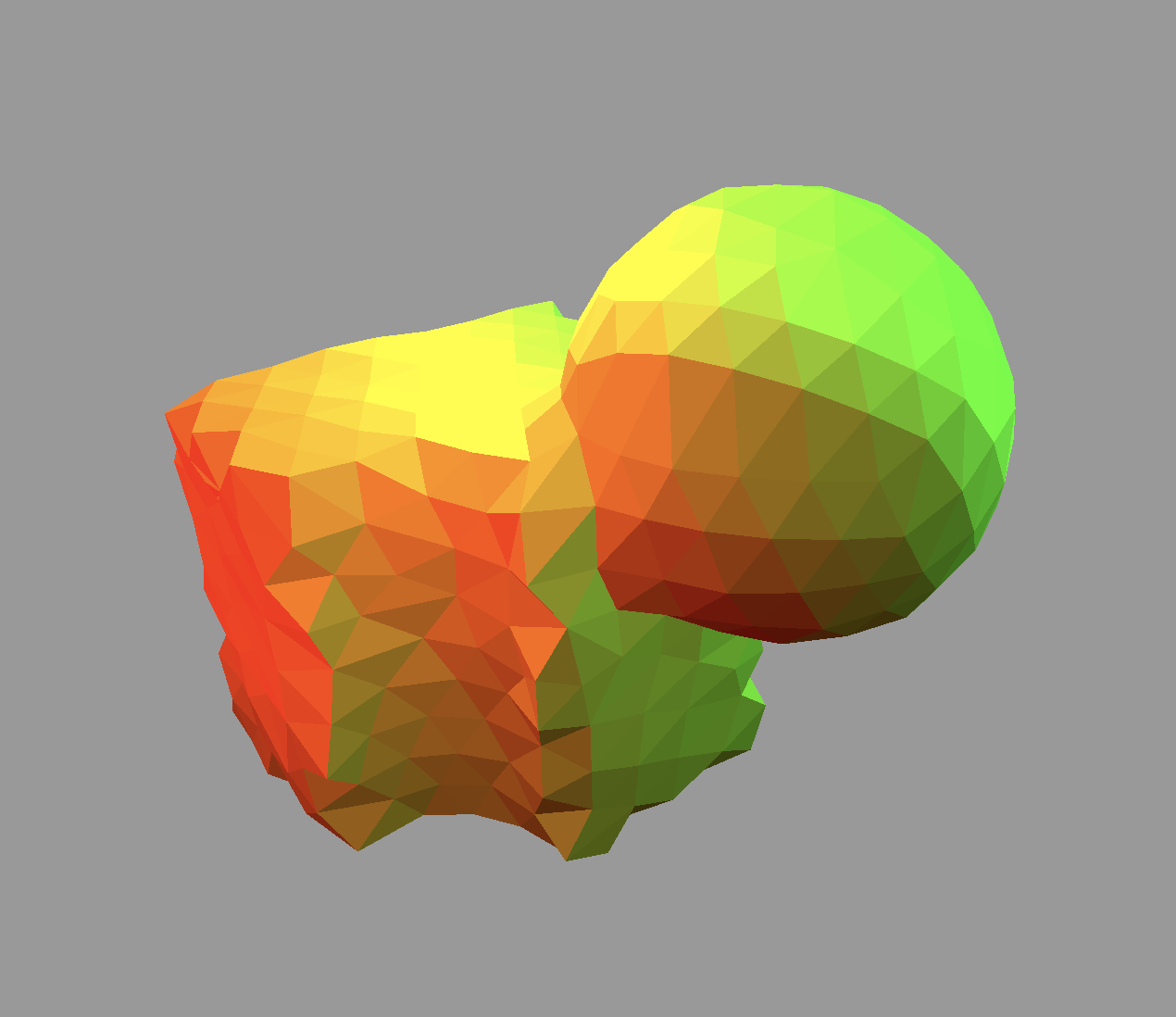
However, I think this freedom also limits the ability of mesh generation methods. It's impossible(?) to find surface points faster than just guessing and checking, as only a boolean function is given to represent objects.
The next step seems to be adding some more descriptive returns to the underlying representation than just in/out.
notes
- i might also post some other stuff on here too